第十一類 並行運動 Parallel Motion.(直線運動 Straight-line Motion.)
本章は初めに専らリンクのみを用いて正確に幾何学の定義に適する直線を描く機構を説き次に平歯車、滑りツガイをも併用して直線を描く機構に及ぶ。直線運動の別名あり。円運動を直線運動にあるいは直線運動を円運動に変ずる機構なり。
260. ポーセリエ並行運動 “Peaucellier” Parallel Motion.
リンク 12, 13 は相等しく。リンク 25, 53, 34, 42 は相等しく、リンク 16, 64 は相等し。リンク 16 を固定するときは点 5 は 16 に直角なる直線を描く。本機構は西暦 1864 年仏人ポーセリエの発明なり。機構 12345 をポーセリエ・セル Peaucellier’s Cell と称す。
261. ハート並行運動 “Hart” Parallel Motion.
リンク 78, 9.10 は相等しく、リンク 89, 7.10 は相等しく、リンク 16, 64 は相等し。回りツガイ 1, 4 の中心、及び点 5 はそれぞれリンク 78, 98, 7.10 の中心線上にありて且之を同じ比に分つ。リンク 16 を固定するときは点 5 リンク 16 に直角なる直線を描く。(260) に次で英人ハートの発明なり。
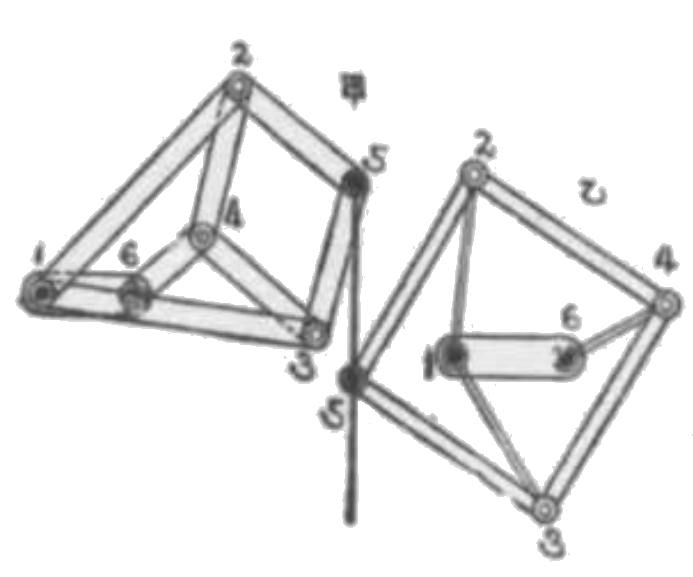
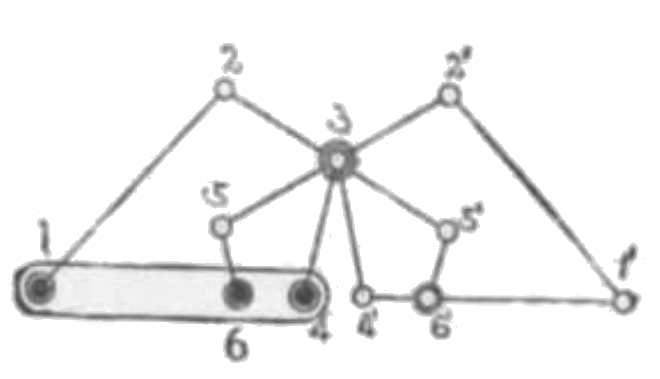
262. プリカード並行運動 “Bricard” Parallel Motion.
リンク 72, 74 は相等しく、リンク 12, 34 は相等しく、三点 1, 2, 5 及び 3, 4, 6 はそれぞれ一直続上にありて且 25:27=27:21, 46:47=47:43, 56:13=27:21。リンク 13 を固定するときは点 7 は 13 を直角に二等分する直線上に運動す。
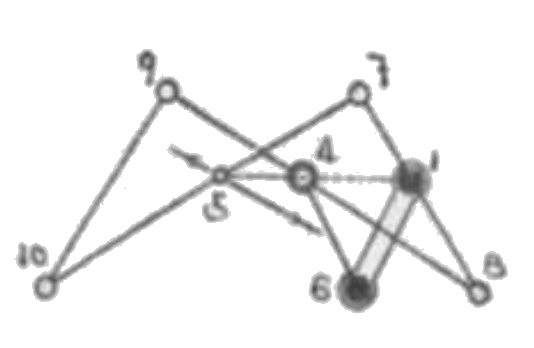
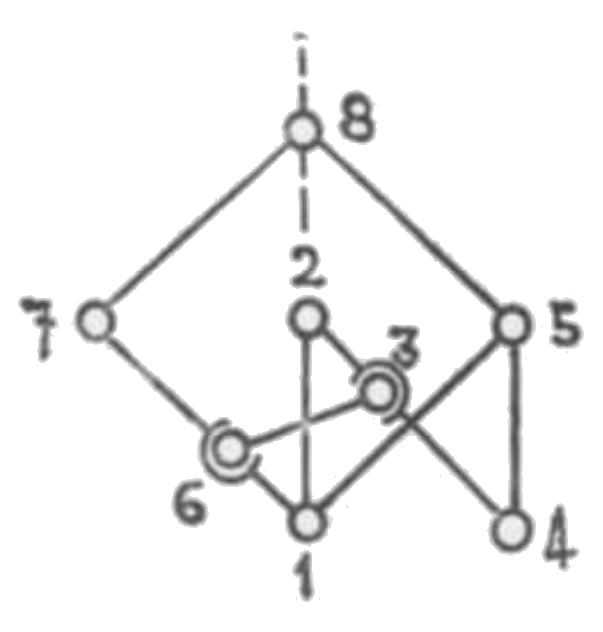
263 ケムプ並行運動(其一) “Kempe” Parallel Motion.
14/12=56/34=61/41, 34=37=32, 57=56=54。三点 1, 2, 6 を一直線上に置けば点 7 はこの直線上に運動す。
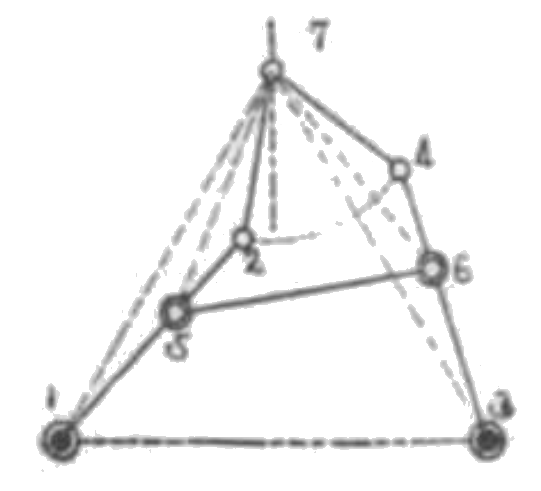
264. 同(其二)
リンク 12, 14, 1’2’, 1’4’ は相等しく、リンク 25’, 2’5 は相等しく且その中央にて蝶番せらる。リンク 43, 4’3, 53, 5’3, 2’3 は相等し。リンク 46, 65, 4’6’, 6’5’ は相等し。三点 1, 6, 4 及び 4’, 6’ 1’ はそれぞれ同一直線上にあり。リンク 12 はリンク 34 の二倍にして且リンク 56 の四倍なり。
リンク 4’6’1’ は左右に直線運動を為す。
265. 同(其三)
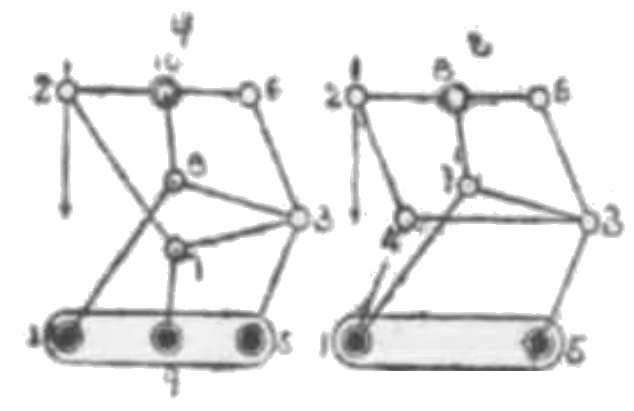
甲図において 26=27=18=15, 36=38=37=35, 10.6=10.8=97=95, 59:35=35:51。三点 1, 9, 5 及び 2, 10, 6 はそれぞれ一直線上にあり。乙図は甲図と同一組立なり。1534, 3496 は並行リンクにして甲図の 27, 73, 79 の代わりに 24, 43, 41 を以てせり。甲乙両図何れも点 2 が直線を描く。
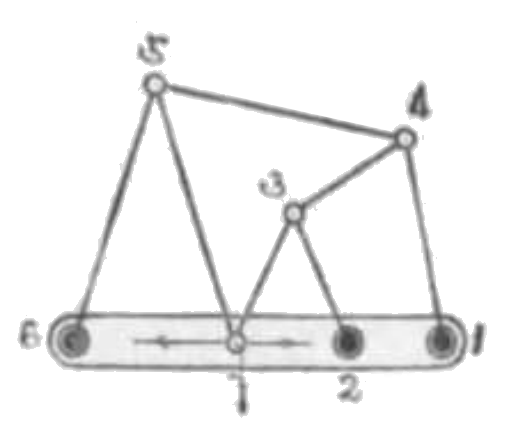
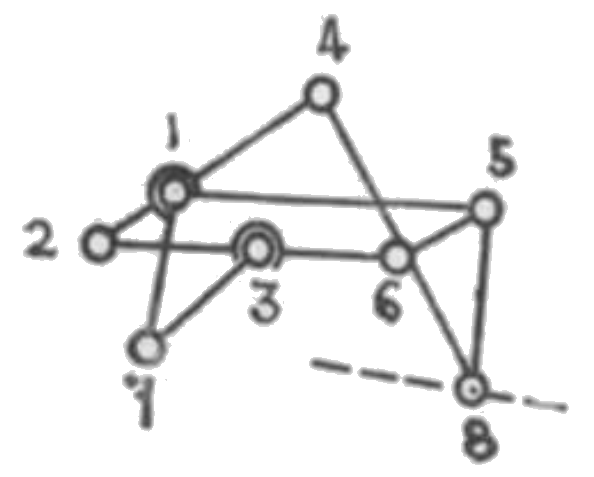
266. ヒスコックス並行運動 “Hiscox” Parallel Motion.
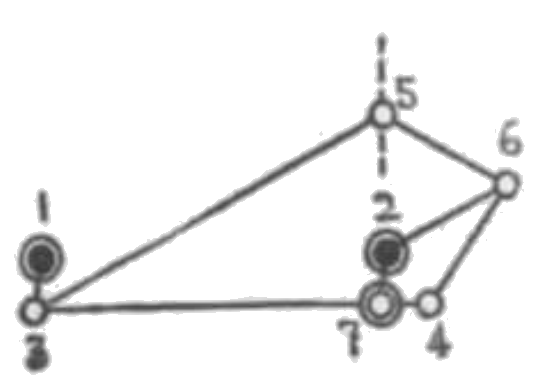
リンク 35=34, 56=26=46, リンク 27=74=13, 37=12。而して 35:56=56:27 とす。三点 3, 7, 4 は一直線上にあらしむ。5 点が 12 に直角なる方向に直線運動を為す。
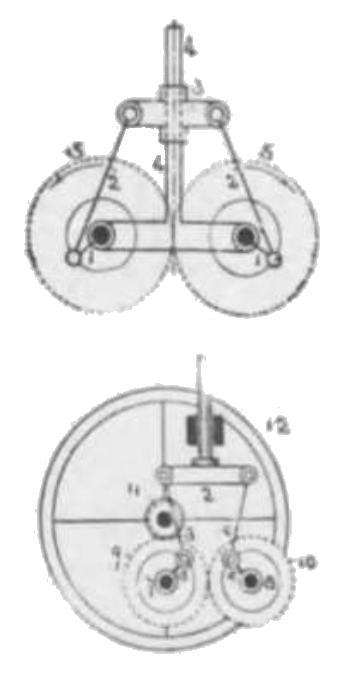
267. 三平歯車による並行運動
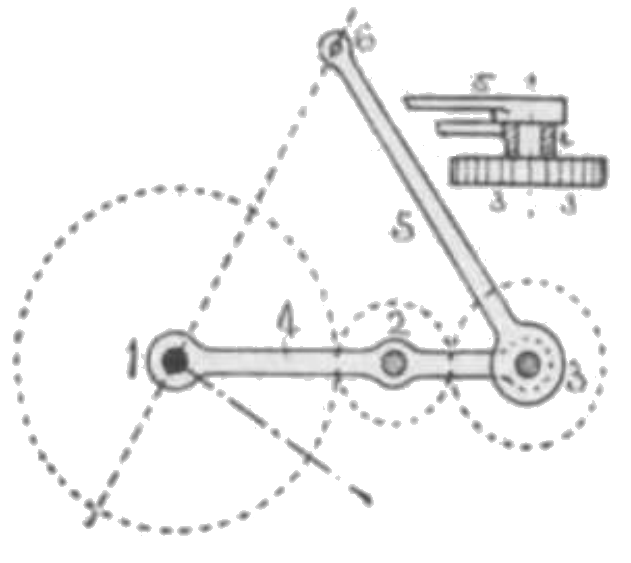
歯車 1, 2, 3 はこの順に組む。腕 5 と歯車 3 は同軸に直結し同時に回転す。両歯車 1, 3 の中心距離は歯車 3 の中心より腕 5 の先端 6 に至る距離に等し。歯車 1 の歯数は歯車 3 の歯数の二倍なり。歯車 1 を固定し腕 4 を一回転するときは点 6 は点 1 を通過する往復直線運動を為す。(740) の特別の場合にて短径ゼロの楕円を描くにより本機を楕円的直線運動 Elliptic Straight Line Motion とも呼ぶ。
268. 同上
本機は (267) の転置機構なり。
歯車 6 は歯車 4 の二倍の歯数を有し何れも任意歯数の車 5 と組む。 歯車 4 はハンドル 17 に固定す。
12=23。6 の軸 3 を軸とするロッド 8 はその中心線が点 1 を通過す。ハンドル 7 の揺動はロッド 8 を正しく上下に直線運動せしむ。
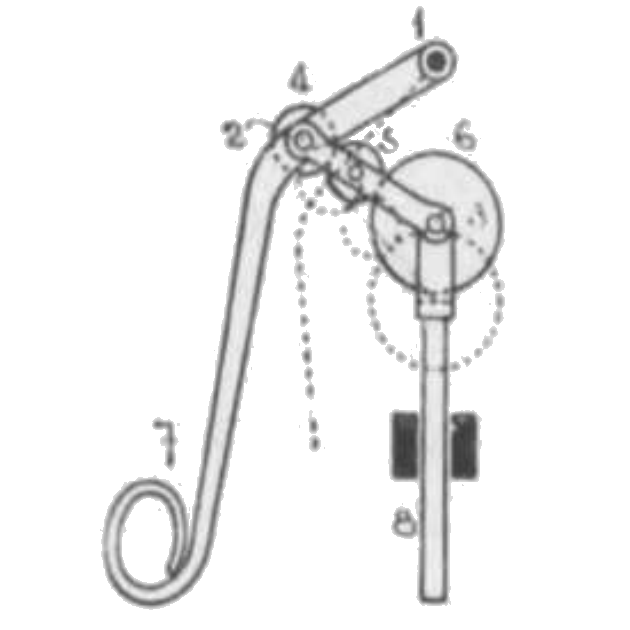
269. 二平歯車による並行運動
5, 5 は相等しき平歯車の組なり。5 と同軸のクランク 1 のピンは連桿 2 の下端と組む。2 の上端は滑り子 3 と組む。3 は 11 に直角なる軸 4 上に上下運動をなす。クランク、連桿は左右同形にして対称の位置にあり。歯車の一回転は 3 を上下に往復運動せしむ。逆に 3 を上下に運動せしめて歯車 5, 5 を回転せしむる応用はルーツ送風機等において((694) を見よ)その例を見る。それには下図の如くハズミ車を要す。ただしルーツ送風機の場合にはピストンそのものがハズミ車と同作用を為す。西暦 1787 年英人カートライト Dr. Cartwright の発明にしてカート・ライト並行運動とも称す。
270. サァラット並行運動 “Sarrut” Parallel Motion.
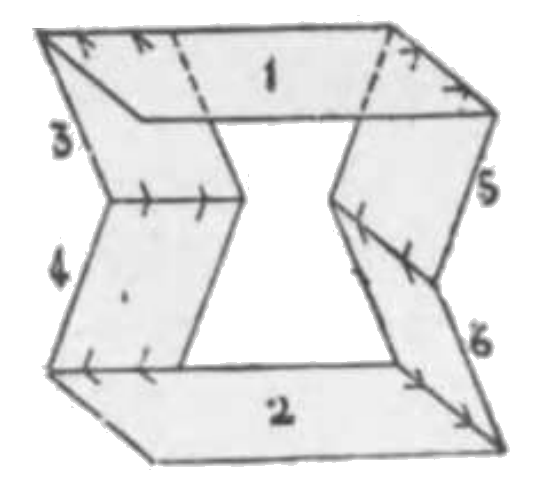
相等しき矩形板 1, 2 は相等しき方形板 3, 4, 5, 6 と図示の如くその辺を蝶番す。1 は 2 に対して垂直に直線運動を為す。本機構は西暦 1853 年サァラット Sarrut の発明にしてポーセリエ並行運動の発明に先つこと十一年なり。
271. ホワイト並行運動 “White” Parallel Motion.

内向平歯車 3 に歯数半分の平歯車 4 が組む。3 と同軸のクランク 12 のピン 2 は歯車 4 の軸を為す。6 は歯車 6 のピッチ円周上の一点なり。3 が静置せられてクランク 12 を回転するときはその一回転は点 6 の往復直線運動を生ず。
272. ルーロー並行運動 “Reuleaux” Parallel Motion.
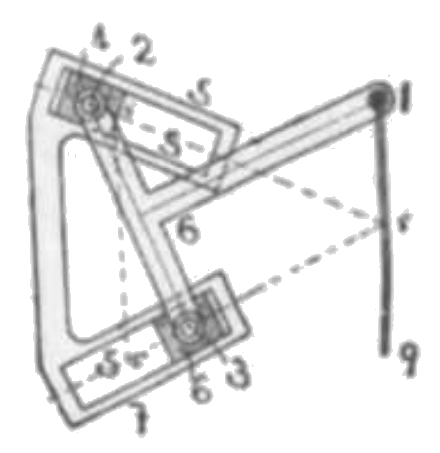
点 1 は両滑り子の軸線の交点 1’ を通過す。点 1 は点 1’ を通過する直線運動を為す。
独人ルーロー発明す。通常 123 を二等辺三角形とするが之れ必要条件にあらず。
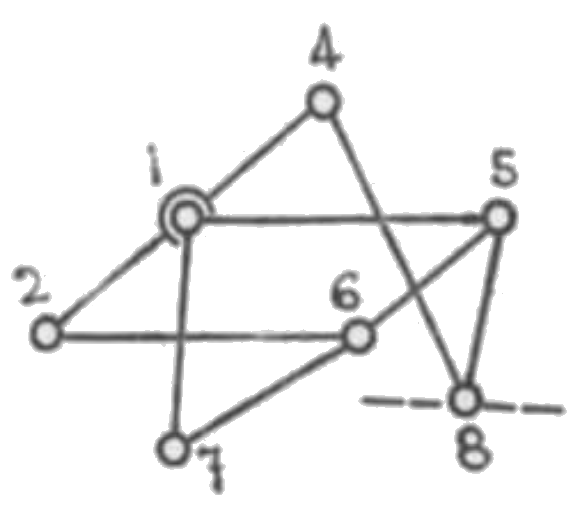
273. 伊藤並行運動
1, 2, 3, 4, 5, 6, 7 は (297) のケムプ・リバーソルなり。リンク 58, 78 を何れも 15 に等しくす。リンク 12 を固定すると 8 点は直線を描く。ただしこの直線は直線 12 と一致す。この機構は昭和八年九月伊藤茂氏発見す。
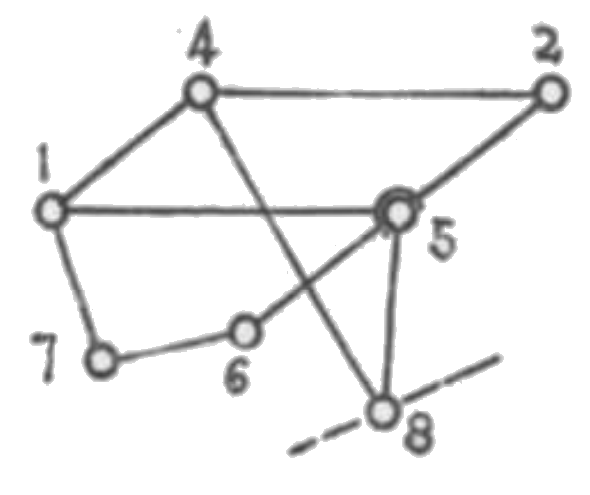
274. 浅川並行運動(其一)
リンク 12=56, 15=26, 17=37, 14=58, 15=48。而して三点 1, 2, 4 及び 2, 3, 6 は何れも一直線上にあり。ただし 3 点は 23:26=21:14 とす。リンク 17 を固定すると点 8 は直線 17 に直角なる直線を描く。
註 この機構は著者の考案なり。リンク 73 を排除してリンク 78 (=17) を用いるときは点 3 が直線を描く。以下起述の機構でも同様の理がある。
274.1 同(其二)
(274) において 12=14=58=56, 15=48, 17=67 とすると当然両点 3, 6 は一致して (275) の如き形となる。リンク 17 を固定せば点 8 は直線 17 に直角なる直線を描く。
274.2 同(其三)
(274.1) を改造して並行リンク 1265 の代わりに並行リンク 1425 を造り且 2, 5, 6 を一直線ならしめてリンク 17 を固定せば点 8 は直線 17 に直角なる直線を描く。